
ROS 2対応のサンプル類を公開し、無償アップデートが可能
ヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、LiDAR(LRF)を搭載した卓上サイズのROS対応台車ロボット「ライトローバー」用に、ROS 2対応のドキュメントおよびサンプル類を公開しました。

■主な特徴
ヴイストン株式会社製の「ライトローバー」は、卓上での運用が可能な小型二輪台車ロボットです。高性能なLiDAR(LRF)とRaspberry Pi 4 Model B(RAM容量4GB版)を標準搭載しており、台車ロボット制御の学習用教材や開発機体として、学校や企業での学習、教育、研修、研究用途などに多く活用されています。
今回公開したROS 2対応のドキュメントおよびサンプル類は、ライトローバーをROS 2に対応させるもので、すでに製品をお持ちの方は無償でダウンロードが可能です。小型・安価でありながら高性能なライトローバーを、ROS 2の学習や研究用途にも活用することが可能となり、既存のROSプロジェクトからのステップアップなどにも有用です。
ヴイストン株式会社では、今回の無償アップデートを通して、ロボットの研究・開発を促進するのみならず、ROS関連教育の分野や人材育成用途などに積極的に貢献してまいります。
(1) ROS 2対応ドキュメントとパッケージを公開
ライトローバーのROS 2対応ドキュメントおよび、ROS 2に対応したパッケージを以下のURLにて公開しました。含まれるサンプルプログラムおよび、必要となる動作環境は下記の通りです。
【公開情報】
・ ドキュメント類
https://vstoneofficial.github.io/lightrover_webdoc/
・ パッケージ等 配布URL
https://github.com/vstoneofficial/lightrover_ros2
【公開サンプルプログラム一覧】
・ ゲームパッドからの操作
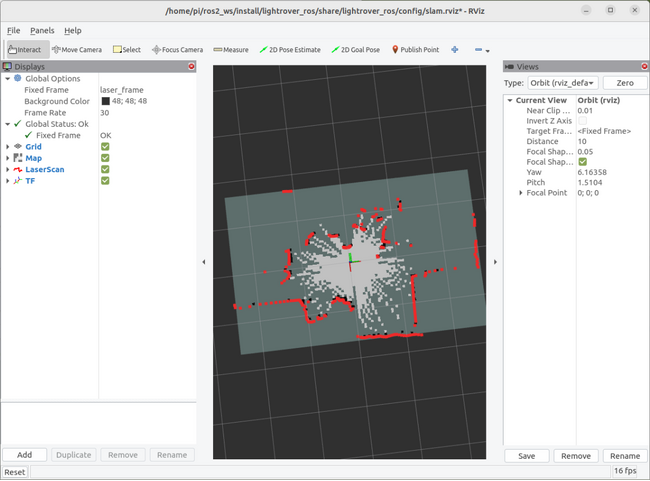
・ SLAM(slam-toolbox)
※Nav2のサンプルについては、近日公開予定です。
【動作環境】
・OS:Ubuntu MATE 22.04
・ROS:ROS2 Humble
(ドキュメントに従い、ライトローバー搭載のRaspberry Piにセットアップが必要です)
■ライトローバーの製品情報および公式YouTube動画
製品ページ: https://www.vstone.co.jp/products/lightrover/
[動画: https://www.youtube.com/watch?v=Aj4qYwBy4PY ]
■本件に関するお問い合わせ先
ヴイストン株式会社
〒555-0012 大阪府大阪市西淀川区御幣島 2-15-28
E-mail: infodesk@vstone.co.jp
https://www.vstone.co.jp/
UbuntuはCanonical Ltd.の商標または登録商標です。
Nav2は、Open Navigation LLCによるオープンソースのプロジェクトです。
ROSは、Open Source Robotics Foundation, Inc.によるオープンソースのプロジェクトです。
その他、記載されている製品名などの固有名詞は、一般に各社の登録商標または商標です。